ų▒ĮŪū°ś╦ÖCŲ„╚╦Ė┼─ŅŻ║
╣żśI(y©©)æ¬ė├ųąŻ¼─▄ē“?q©▒)Ź¼F(xi©żn)ūįäė┐žųŲĄ─Īó┐╔ųžÅ═ŠÄ│╠Ą─ĪóČÓ╣”─▄Ą─ĪóČÓūįė╔Č╚Ą─Īó▀\äėūįė╔Č╚Į©│╔┐šķgų▒ĮŪĻPŽĄĪóČÓė├═ŠĄ─▓┘ū„ÖCĪŻ╦¹─▄ē“░ß▀\╬’¾wĪó▓┘ū„╣żŠ▀Ż¼ęį═Ļ│╔Ė„ĘNū„śI(y©©)ĪŻĻPė┌ÖCŲ„╚╦Ą─Č©┴xļSų°┐Ų╝╝Ą─▓╗öÓ░l(f©Ī)š╣Ż¼į┌▓╗öÓĄ─═Ļ╔ŲŻ¼ų▒ĮŪū°ś╦ÖCŲ„╚╦ū„×ķÖCŲ„╚╦Ą─ę╗ĘNŻ¼Ųõ║¼┴xę▓į┌▓╗öÓĄ─═Ļ╔ŲųąĪŻ
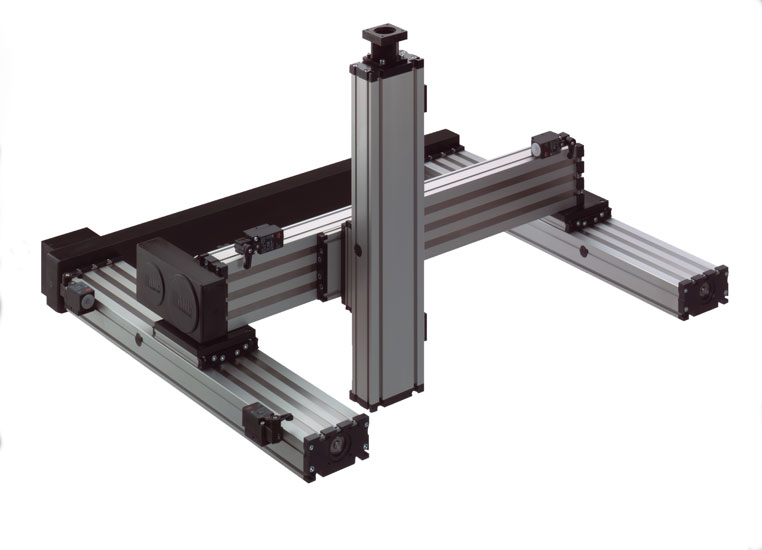
Ąõą═ų▒ĮŪū°ś╦ÖCŲ„╚╦łDę╗
ų▒ĮŪū°ś╦ÖCŲ„╚╦Ą─╠ž³cŻ║
1Īóūįė╔Č╚▀\äėŻ¼├┐éĆ▀\äėūįė╔Č╚ų«ķgĄ─┐šķgŖAĮŪ×ķų▒ĮŪŻ╗
2Īóūįäė┐žųŲĄ─Ż¼┐╔ųžÅ═ŠÄ│╠Ż¼╦∙ėąĄ─▀\äėŠ∙░┤│╠ą“▀\ąąŻ╗
3Īóę╗░Ńė╔┐žųŲŽĄĮy(t©»ng)Īó“ī(q©▒)äėŽĄĮy(t©»ng)ĪóÖCąĄŽĄĮy(t©»ng)Īó▓┘ū„╣żŠ▀Ą╚ĮM│╔ĪŻ
4Īóņ`╗ŅŻ¼ČÓ╣”─▄Ż¼ę“▓┘ū„╣żŠ▀Ą─▓╗═¼╣”─▄ę▓▓╗═¼ĪŻ
5ĪóĖ▀┐╔┐┐ąįĪóĖ▀╦┘Č╚ĪóĖ▀Š½Č╚ĪŻ
6Īó┐╔ė├ė┌É║┴ėĄ─Łh(hu©ón)Š│Ż¼┐╔ķLŲ┌╣żū„Ż¼▒Ńė┌▓┘ū„ŠSą▐ĪŻ
ų▒ĮŪū°ś╦ÖCŲ„╚╦Ą─æ¬ė├Ż║
ę“─®Č╦▓┘ū„╣żŠ▀Ą─▓╗═¼Ż¼ų▒ĮŪū°ś╦ÖCŲ„╚╦┐╔ęįĘŪ│ŻĘĮ▒ŃĄ─ė├ū„Ė„ĘNūįäė╗»įOéõŻ¼═Ļ│╔╚ń║ĖĮėĪó░ß▀\Īó╔ŽŽ┬┴ŽĪó░³čbĪó┤aČŌĪó▓ČŌĪóÖz£yĪó╠Įé¹ĪóĘųŅÉĪóčb┼õĪó┘Nś╦ĪóćŖ┤aĪó┤“┤aĪóŻ©▄øĘ┬ą═Ż®ćŖ═┐Īó─┐ś╦Ė·ļSĪó┼┼▒¼Ą╚ę╗ŽĄ┴ą╣żū„ĪŻ╠žäe▀mė├ė┌ČÓŲĘĘNĪó▒Ń┼·┴┐Ą─╚ßąį╗»ū„śI(y©©)Ż¼ī”ė┌ĘĆ(w©¦n)Č©╠ßĖ▀«a(ch©Żn)ŲĘ┘|(zh©¼)┴┐Ż¼╠ßĖ▀ä┌äė╔·«a(ch©Żn)┬╩Ż¼Ė─╔Ųä┌äėŚl╝■║═«a(ch©Żn)ŲĘĄ─┐ņ╦┘Ė³ą┬?li©ón)Q┤·Ųų°╩«Ęųųžę¬Ą─ū„ė├ĪŻ
ų▒ĮŪū°ś╦ÖCŲ„╚╦Ą─æ¬ė├łDČ■
ļSų°ų▒ĮŪū°ś╦ÖCŲ„╚╦Ą─æ¬ė├įĮüĒįĮÅVĘ║Ż¼ų▒ĮŪū°ś╦ÖCŲ„╚╦Ą─įOėŗ╣żū„╚šęµ’@Ą├ųžę¬ĪŻ│╔╣”Ą─įOėŗę╗┼_ų▒ĮŪū°ś╦ÖCŲ„╚╦╔µ╝░ĄĮ║▄ČÓĘĮ├µĄ─╣żū„Ż¼░³└©ÖCąĄĮY(ji©”)śŗĪóäė┴”“ī(q©▒)äėĪó╦┼Ę■┐žųŲĄ╚Ą╚ĪŻ╔“Ļ¢┴”═žūįäė╗»┐žųŲ╝╝ągėąŽ▐╣½╦Šėąų°ČÓ─Ļų▒ĮŪū°ś╦ÖCŲ„╚╦╝╝ągæ¬ė├ĪóöĄ(sh©┤)┐ž╝╝ąg║═«a(ch©Żn)ŲĘčą░l(f©Ī)Įø(j©®ng)“ׯ¼╬ęéāę└═ąĄ┬ć°BAHR╣½╦Šų▒ŠĆČ©╬╗ŽĄĮy(t©»ng)ąį╝░ÖCąĄ╩ų▒█ķ_░l(f©Ī)│÷┴╦ār▒╚ā×(y©Łu)┴╝Ą─ŽĄ┴ąöĄ(sh©┤)┐žų▒ĮŪū°ś╦ÖCŲ„╚╦Ż¼▒╗ÅVĘ║Ąžæ¬ė├į┌Ų¹▄ćĪóļŖūėĪóļŖŲ„ĪóÖz£yĪóßt(y©®)»¤Īó║Į╠ņĪó╩│ŲĘĄ╚Ė„éĆŅIė“Ą─╔·«a(ch©Żn)ŠĆ╔ŽĪŻ
Ž┬├µ╬ęéāŠ═ī”ų▒ĮŪū°ś╦ÖCŲ„╚╦Ą─įOėŗ▀Mąąę╗éĆ║åꬥ─ĻU╩÷ĪŻ
ę╗ĪóÖCŲ„╚╦įOėŗ╠ž³cŻ║
1ĪóÖCŲ„╚╦Ą─įOėŗ╩Ūę╗éĆÅ═ļsĄ─╣żū„Ż¼╣żū„┴┐║▄┤¾Ż¼╔µ╝░Ą─ų¬ūR├µ║▄ČÓŻ¼═∙═∙ąĶę¬ČÓ╚╦═Ļ│╔ĪŻ
2ĪóÖCŲ„╚╦įOėŗ╩Ū├µŽ“┐═æ¶Ą─įOėŗŻ¼▓╗╩Ūķ]ķTįņ▄ćĪŻįOėŗš▀ąĶę¬Įø(j©®ng)│Ż║═ė├æ¶į┌ę╗ŲŻ¼▓╗═ŻĘų╬÷ė├æ¶ę¬Ū¾Ż¼īżŪ¾ĮŌøQĘĮ░ĖĪŻ
3ĪóÖCŲ„╚╦įOėŗ╩Ū├µŽ“╝ė╣żĄ─įOėŗŻ¼į┘║├Ą─įOėŗŻ¼╚ń╣¹╣żÅS▓╗─▄╝ė╣ż│÷«a(ch©Żn)ŲĘŻ¼įOėŗę▓╩Ū╩¦öĪĄ─Ż¼įOėŗš▀ąĶ꬚Ų╬š┤¾┴┐Ą─╝ė╣ż╣ż╦ć╝░╝ė╣ż╩ųČ╬ĪŻ
4ĪóÖCŲ„╚╦įOėŗ╩Ūę╗éĆ▓╗öÓ═Ļ╔ŲĄ─▀^│╠ĪŻ
Č■ĪóÖCŲ„╚╦įOėŗ┴„│╠Ż║
1Īó╩╣ė├ę¬Ū¾Ą─Ęų╬÷Ż║├┐ę╗éĆÖCŲ„╚╦Č╝╩ŪĖ∙ō■(j©┤)╠žČ©Ą─ę¬Ū¾Ą─«a(ch©Żn)╔·Č°įOėŗĄ─Ż¼įOėŗĄ─Ą┌ę╗▓ĮŠ═╩Ūę¬īó╩╣ė├ę¬Ū¾Ęų╬÷ŪÕ│■Ż¼┤_Č©įOėŗĢrąĶę¬┐╝æ]Ą─ģóöĄ(sh©┤)Ż¼░³└©Ż║
ÖCŲ„╚╦Ą─Č©╬╗Š½Č╚Ż¼ųžÅ═Č©╬╗Š½Č╚Ż╗
ÖCŲ„╚╦Ą─žō▌d┤¾ąĪŻ¼žō▌d╠žąįŻ╗
ÖCŲ„╚╦▀\äėĄ─ūįė╔Č╚öĄ(sh©┤)┴┐Ż¼├┐ūįė╔Č╚Ą─▀\äėąą│╠Ż╗
ÖCŲ„╚╦Ą─╣żū„ų▄Ų┌╗“▀\äė╦┘Č╚Ż¼╝ė£p╦┘╠žąįŻ╗
ÖCŲ„╚╦Ą─▀\äė▄ē█EŻ¼äėū„Ą─ĻP┬ō(li©ón)Ż╗
ÖCŲ„╚╦Ą─╣żū„Łh(hu©ón)Š│Īó░▓čbĘĮ╩ĮŻ╗
ÖCŲ„╚╦Ą─▀\ąą╣żū„ųŲĪó▀\ąąē█├³Ż╗
Ųõ╦¹╠ž╩Ōę¬Ū¾Ż╗
2Īó ▒ŠÖCąĄ─Żą═│§Į©Ż║ÖCŲ„╚╦Å─ÖCąĄĮY(ji©”)śŗĘų┤¾¾w┐╔Ęų×ķ²łķTĮY(ji©”)śŗĪó▒┌ÆņĮY(ji©”)śŗŻ¼┤╣ÆņĮY(ji©”)śŗŻ¼Ė∙ō■(j©┤)░▓čb┐š
ķgĄ─ę¬Ū¾▀xō±▓╗═¼Ą─ĮY(ji©”)śŗŻ¼├┐ĘNĮY(ji©”)śŗĄ─┴”īW╠žąįĪó▀\äė╠žąįČ╝╩Ū▓╗ę╗śėĄ─ĪŻ║¾└m(x©┤)Ą─įOėŗ▒žĒÜ╩Ū╗∙ė┌ę╗éĆ┤_Č©Ą─ĮY(ji©”)śŗĪŻ
ÖCŲ„╚╦Ą─╗∙▒ŠĮY(ji©”)śŗłD╚²
3Īó▀\äėąį─▄ėŗ╦ŃŻ║ėąĻPįōąį─▄Ą─ģóöĄ(sh©┤)ėąŻ║
ŲĮŠ∙╦┘Č╚Ż║V=S/t ╦┘Č╚Ū·ŠĆ╦─
ūŅ┤¾╦┘Č╚Ż║Vmax=at
╝ė╦┘Č╚/£p╦┘Č╚Ż║a=F/m
ŲõųąŻ║S×ķ▀\äėąą│╠
t×ķČ©╬╗▀\äėĢrķg
F╝ė╦┘ĢrĄ─“ī(q©▒)äė┴”
M▀\äė╬’¾w┘|(zh©¼)┴┐║═
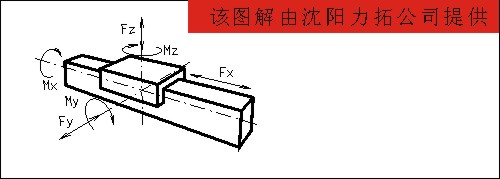
4Īó┴”īW╠žąįĘų╬÷
ę╗éĆÖCŲ„╚╦╩Ūė╔įSČÓČ©╬╗å╬į¬ĮM│╔Ą─Ż¼├┐Ė∙Č©╬╗ŽĄĮy(t©»ng)Č╝ę¬Ęų╬÷ĪŻąĶę¬Ęų╬÷Ą─ĒŚ─┐╚ńŽ┬Ż║
╦«ŲĮ═Ų┴”Fx ┴”īWĘų╬÷łD╬Õ
š²ē║┴”Fz
é╚(c©©)ē║┴”Fy
MxĪóMyĪóMz
5ĪóÖCąĄÅŖČ╚ąŻ║╦Ż║
├┐éĆČ©╬╗å╬į¬Ż¼├┐éĆ┴║Č╝ę¬▀MąąąŻ║╦Ż¼ė╚ŲõļpČ╦ų¦ō╬┴║║═æę▒█┴║ĪŻ
1Ż® ōŽČ╚ūāą╬ėŗ╦Ń
ōŽČ╚ūāą╬łD┴∙
FŻ║žō▌dŻ©NŻ®Ż╗
LŻ║Č©╬╗å╬į¬ķLČ╚Ż©mmŻ®Ż╗
EŻ║▓─┴ŽÅŚąį─Ż┴┐Ż╗
IŻ║▓─┴ŽĮž├µæTąįŠž(mm4)Ż╗
fŻ║ōŽČ╚ą╬ūāŻ©mmŻ®
ūóęŌŻ║į┌ėŗ╦ŃōŽČ╚ą╬ūāĢrŻ¼┴║Ą─ūįųž«a(ch©Żn)╔·Ą─ūāą╬▓╗─▄║÷ęĢŻ¼┴║Ą─ūįųž░┤Š∙▓╝▌d║╔ėŗ╦ŃĪŻ
ęį╔Ž╣½╩Įėŗ╦ŃĄ─╩ŪņoæB(t©żi)ą╬ūāŻ¼īŹļHæ¬ė├ųąŻ¼ę“×ķÖCŲ„╚╦ę╗ų▒╠Äė┌▀\äėĀŅæB(t©żi)Ż¼▒žĒÜėŗ╦Ń╝ė╦┘┴”«a(ch©Żn)╔·Ą─ą╬ūāŻ¼ą╬ūāų▒Įėė░ĒæÖCŲ„╚╦Ą─▀\ąąŠ½Č╚ĪŻ
2Ż®┼ż▐D(zhu©Żn)ą╬ūāėŗ╦ŃŻ║
«öę╗Ė∙┴║Ą─ę╗Č╦╣╠Č©Ż¼┴Ēę╗Č╦╩®╝ėę╗éĆ└@▌S┼żŠž║¾Ż¼īó«a(ch©Żn)╔·┼żŪ·ūāą╬ĪŻīŹļHæ¬ė├ųą«a(ch©Żn)╔·įōą╬ūāĄ─įŁę“ę╗░Ń╩Ūžō▌dŲ½ą─╗“ėą└@▌S╝ė╦┘ą²▐D(zhu©Żn)Ą─╬’¾w┤µį┌ĪŻ
┼ż▐D(zhu©Żn)┴”ŠžĘų╬÷łDŲ▀Īó░╦
6Īó“ī(q©▒)äėį¬╝■▀xō±
│Żė├Ą─“ī(q©▒)äėŽĄĮy(t©»ng)ėąŻ║Į╗┴„/ų¦┴„╦┼Ę■ļŖÖC“ī(q©▒)äėŽĄĮy(t©»ng)Īó▓Į▀MļŖÖC“ī(q©▒)äėŽĄĮy(t©»ng)Īóų▒ŠĆ╦┼Ę■ļŖÖC/ų▒ŠĆ▓Į▀MļŖÖC“ī(q©▒)äėŽĄĮy(t©»ng)ĪŻ
├┐ę╗éĆ“ī(q©▒)äėŽĄĮy(t©»ng)Č╝ė╔ļŖÖC║═“ī(q©▒)äėŲ„ā╔▓┐ĘųĮM│╔ĪŻ“ī(q©▒)äėŲ„Ą─ū„ė├╩Ūīó╚§ļŖą┼╠¢Ę┼┤¾Ż¼īóŲõ╝ė▌dį┌“ī(q©▒)äėļŖÖCĄ─ÅŖļŖ╔ŽŻ¼“ī(q©▒)äėļŖÖCĪŻļŖÖCät╩ŪīóļŖą┼╠¢▐D(zhu©Żn)╗»│╔Š½┤_Ą─╦┘Č╚╝░ĮŪ╬╗ęŲĪŻ
ąĶę¬ėŗ╦ŃĄ─ĒŚ─┐╚ńŽ┬Ż║
ļŖÖC╣”┬╩Ż║
ļŖÖC┼żŠžŻ║
ļŖÖC▐D(zhu©Żn)╦┘Ż║
£p╦┘ÖC£p╦┘▒╚
ļŖÖCæT┴┐/žō▌dæT┴┐Ą─Ųź┼õĻPŽĄ
Ųõ╦¹ėŗ╦Ń╣½╩Į╝░ėŗ╦ŃĘĮĘ©šł┼c╔“Ļ¢┴”═ž╣½╦Š┬ō(li©ón)ŽĄĪŻ
7ĪóÖCąĄĮY(ji©”)śŗįOėŗ
į┌═Ļ│╔┴╦Ū░├µ┴∙ĒŚ╣żū„║¾Ż¼ę╗éĆų▒ĮŪū°ś╦ÖCŲ„╚╦Č©╬╗ŽĄĮy(t©»ng)Ą─ļrą╬Š═ęčĮø(j©®ng)į┌įOėŗš▀Ą─Ņ^─Xųąą╬│╔┴╦Ż¼ĮėŽ┬üĒĄ─╣żū„Š═╩Ūīóļrą╬«ŗ│╔╣ż│╠łDŻ¼ęį▒Ń╔·«a(ch©Żn)ĪŻ╬ęéāĮ©ūhė├æ¶ė├╚²ŠS▄ø╝■įOėŗŻ¼ęį▒ŃÖz▓ķ╩Ūʱ┤µį┌╬╗ų├Ė╔╔µĪŻ
ÖCŲ„╚╦Ą─▀\äė▄ē█EŠ▀ėą▓╗┤_Č©ąįŻ¼ņ`╗ŅČÓūāŻ¼═∙═∙į┌ę╗éĆ╬╗ų├▓╗┤µį┌╬╗ų├Ė╔╔µŻ¼Ą½ĄĮŽ┬ę╗éĆ╬╗ų├Š═Ė╔╔µ┴╦ĪŻ
8ĪóįOéõē█├³ąŻ║╦
ÖCąĄĮY(ji©”)śŗįOėŗ═Ļ│╔║¾Ż¼ę¬ī”š¹┼_įOéõ▀Mąąē█├³ėŗ╦ŃŻ¼║╦ą─į¬╝■Ą─ē█├³ĄĮę¬ėŗ╦ŃŻ¼╚ńÖCŲ„╚╦▄ēĄ└Ą─ē█├³Ż¼£p╦┘ÖCĄ─ē█├³Ż¼╦┼Ę■ļŖÖCĄ─ē█├³Ą╚ĪŻ
ÖCŲ„╚╦Ą─▀\ąąē█├³┼c▀\ąą╦┘Č╚Īóžō▌d┤¾ąĪĪóĮY(ji©”)śŗą╬╩ĮĪó╣żū„Łh(hu©ón)Š│Īó╣żū„ųŲĄ╚ėąĻPĪŻ
╚ń╣¹░l(f©Ī)¼F(xi©żn)ÖCŲ„╚╦Ą─▀\ąąē█├³╠½Č╠Ż¼ąĶę¬ųžą┬š{(di©żo)š¹įOėŗĪŻ
Š▀¾wėŗ╦ŃĘĮĘ©šł┼c╔“Ļ¢┴”═ž╣½╦Š┬ō(li©ón)ŽĄĪŻ
9Īó┐žųŲŽĄĮy(t©»ng)Ą─▀xō±
ø]ėą┐žųŲŽĄĮy(t©»ng)Ą─ÖCŲ„╚╦Š═Ž¾╚╦ø]ėą┤¾─Xę╗śėŻ¼▓╗─▄ł╠(zh©¬)ąą╚╬║╬äėū„ĪŻ╦∙ęį╬ęéā═©│Żīóø]ėą┼õéõ┐žųŲŽĄĮy(t©»ng)Ą─ÖCąĄĮY(ji©”)śŗĘQ×ķ┬ŃÖC╗“ÖCŲ„╚╦Č©╬╗ŽĄĮy(t©»ng)Ż©robot positioning systemŻ®ĪŻ
Ė∙ō■(j©┤)ę¬Ū¾Ą─▓╗═¼Ż¼┐žųŲŽĄĮy(t©»ng)Ą─▀xō±ę▓▓╗═¼Ż¼═©│Ż▀xō±ū„×ķ┐žųŲŽĄĮy(t©»ng)Ą─«a(ch©Żn)ŲĘėąŻ║
PLC │╠ą“┐žųŲŲ„Ż╗
╣żśI(y©©)▀\äė┐žųŲ┐©Ż©motion cardŻ®;
öĄ(sh©┤)ūų┐žųŲŽĄĮy(t©»ng)(CNC)
īŻė┌┐žųŲŲ„
10Īó│╠ą“ŠÄīæ
┐žųŲŽĄĮy(t©»ng)╩ŪÖCŲ„╚╦Ą─┤¾─XŻ¼│╠ą“╩ŪÖCŲ„╚╦Ą─╦╝ŽļĪŻ│╠ą“Ą─ŠÄīæų▒ĮėĘ┤æ¬įOėŗš▀Ą─╦╝ŽļĪóęŌłD║═▀\äėąĶŪ¾ĪŻ
ŠÄīæ│╠ą“╩Ūę╗éĆÅ═ļsĄ─▀^│╠Ż¼Ą½ų╗ę¬ÖCŲ„╚╦┐é¾wįOėŗø]ėąå¢Ņ}Ż¼│╠ą“┐éĢ■ŠÄ│÷üĒĄ─ĪŻŠÄ│╠ą“ę¬ūóęŌęįŽ┬å¢Ņ}Ż║
ī”╚╬䚥─Ęų╬÷ę¬ŪÕ╬·Ż¼ŠÄ│╠īė┤╬ę¬Ęų├„Ż¼▀ē▌ŗŪÕ╬·ĪŻ
ĮY(ji©”)╩°šZŻ║
ÖCŲ„╚╦Ą─įOėŗ╩Ūę╗éĆ▓╗öÓ╩ņŽżŻ¼▓╗öÓ═Ļ╔ŲĄ─▀^│╠Ż¼ąĶę¬▓╗öÓį┌īŹļHæ¬ė├ųą┐éĮY(ji©”)╠ßĖ▀ĪŻā╚(n©©i)╚▌²ŗļsŻ¼╝Ü╣Ø(ji©”)▒ŖČÓĪŻ▒Š╬─ų╗╩Ūū÷┴╦ą®║åå╬Ą─ĮķĮBŻ¼ėą┼d╚ż┼¾ėč┐╔┼c╬ęéā┬ō(li©ón)ŽĄŻ©lt.sy@126.comŻ®Ż¼╦„╚Īįö╝ÜĄ─įOėŗ┘Y┴Ž